If I will build another printer I will choose a more beaten path - Arduino Mega with Ramps and motor drivers.
I shortly realized that there is no bootloader on the Sanguinololu's Atmega1284p, so I bought a $7 USBasp programmer from ebay. I tried to follow the instructions from USBasp programmer for Sanguinololu page, but no success. You can see my setup below (NOTE: Do Not power the Sanguinololu board, the chip will be powered by the programmer)

My patch between the programmer and the Sanguinololu was:
| Function | USBasp Programmer Output | Sanguinololu ISP header |
| MISO | 9 | 1 |
| VCC +5V | 2 | 2 |
| SCK | 7 | 3 |
| MOSI | 1 | 4 |
| RESET | 5 | 5 |
| GDN | 10 | 6 |
After I exhausted all options that I could think about I decided to buy a Arduino Uno to use it as a programmer and use the approach from this Burning the Sanguino Bootloader using Arduino as ISP page, but patching to the Sanguinololu board directly, because I did not have all the electronic components, using the following patch table:
| Function | Arduino UNO Pins | Sanguinololu ISP header |
| MISO | 12 | 1 |
| VCC +5V | 5Vcc | 2 |
| SCK | 13 | 3 |
| MOSI | 11 | 4 |
| RESET | 10 | 5 |
| GDN | GDN | 6 |
And you can see my new setup:
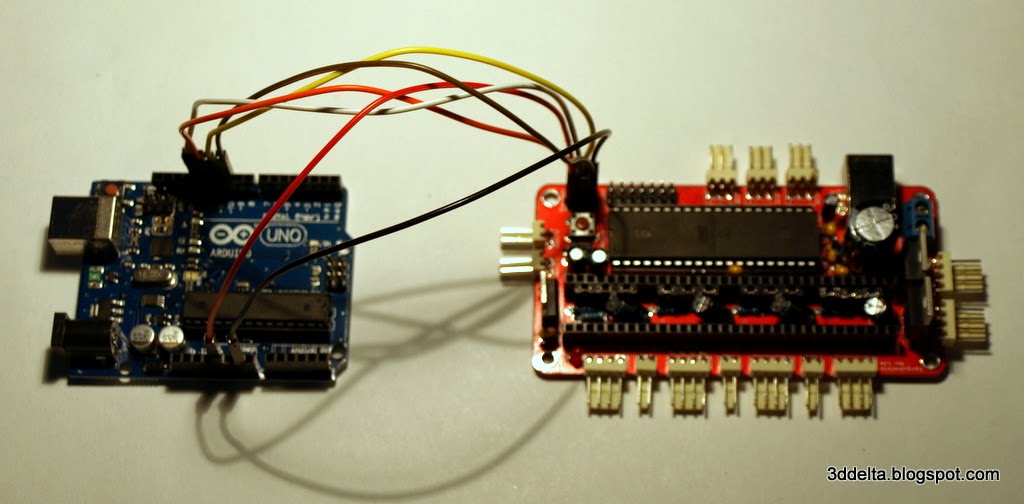
This din not work either.